Welcome to a brand-new science capsule. Today’s focus is on the machines that have let us closely explore some of the celestial bodies around us: rovers. More specifically, how these came to be, what the history behind them is, and what we can expect from them in the future. We will also highlight some iconic rover missions throughout time, in order to better illustrate the impact they have had on the space industry. And so, let’s start at the beginning by discussing the first type of rover to be deployed, the lunar rover.
Early Rovers
To find the first ever rover to be deployed, we have to journey back to 1970. More specifically, the Soviet Union’s Lunokhod Program and the Lunokhod 1 mission. With the start of its journey in November of 1970, Lunokhod 1 became the first rover to land on non-Earthly terrain. It reached the lunar surface thanks to a Luna 17 lander, touching down in Mare Imbrium. Once there, Lunokhod 1 remained operational until October of the following year.
As was customary during the space race, when one of the US or Soviet Union did something, the other was not far behind. And so, the next rover we are going to look into is the Lunar Roving Vehicle or LRV. Also known as “Moon Buggy”, this was a series of rovers that accompanied Apollo 15, 16, and 17. Spanning 1971 and 1972, the LRVs were a key component of these final missions of the Apollo program. Also, they could carry up to two astronauts together with their equipment and any lunar samples collected. Before moving on, I want to point out one more thing: these were the first and, so far, only crewed rovers to have ever been deployed.
 The LRV; Image Credit: NASA
The LRV; Image Credit: NASA
The final rover we are going to discuss in this section is Lunokhod 2. Similar to its predecessor, this was an uncrewed lunar rover and got to the Moon aboard a Luna spacecraft. In this case, Luna 21. Its mission was also focused on further studying the Moon. Some examples of its research included observing solar x-rays and studying the soil mechanics of the lunar surface. The focus on soil, specifically, is something to keep in mind as we journey through the evolution of rovers.
A New Age of Space Exploration – The Mars Rovers
We are now going to move on to what might be the most famous category of rovers, the Martian ones. Although that may very well have to do with the fact that these missions are more recent than the ones we discussed so far. But fret not, lunar rovers will make their triumphant return later in this article. For now, let’s discuss the rovers that NASA sent to roam the red planet.
The Sojourner Revolution
The first rover to operate on Mars was Sojourner, in 1997, as part of the Mars Pathfinder mission. And this is where we can see a shift in how rovers started being designed. Because Sojourner’s primary objective was to test out if it could operate and function on Mars’s soil. Now, that may sound basic; however, this was the first time any machine was going to try to operate on the red planet’s surface. And unlike the Moon, no one had (or has) landed on Mars. So, the engineers in charge had to design a rover based only on the data gathered on the planet thus far. Not exactly easy. And yet, Sojourner was able to operate on Earth’s neighbor and, in the process, provided invaluable information as to how to produce Martian rovers in the future.
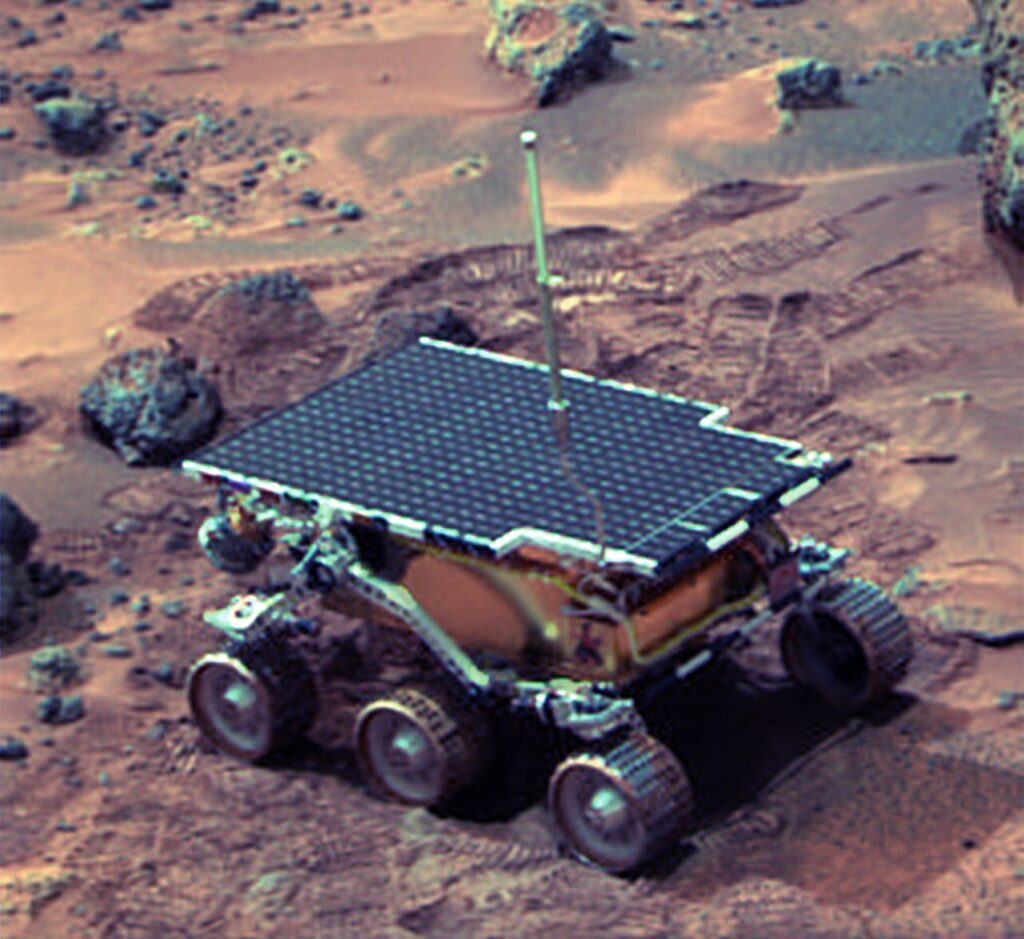 Sojourner; Image Credit: NASA
Sojourner; Image Credit: NASA
It was also accompanied by a lander, which imaged Sojourner’s operations and relayed data from it back to Earth. In fact, landers are a crucial part to any rover mission (they need to be able to land first, after all). So, while I will not be explicitly mentioning them throughout this article, do note that they are there. And that they are very important.
Mars Exploration Rovers
There are two more rovers that are worth mentioning before moving on to the “modern” ones. And they are both part of the Mars Exploration Rover mission. These are the Spirit and Opportunity rovers launched in 2003. Although they both landed on Mars the following year. Both of them made huge strides in terms of the research they conducted and their longevity. Spirit was able to remain operational on Mars for 6 years, albeit it got stuck in sand towards the end of its mission. During that time, it covered 7.73 km (4.80 mi) and explored the Martian soil longer than anyone could have hoped for.
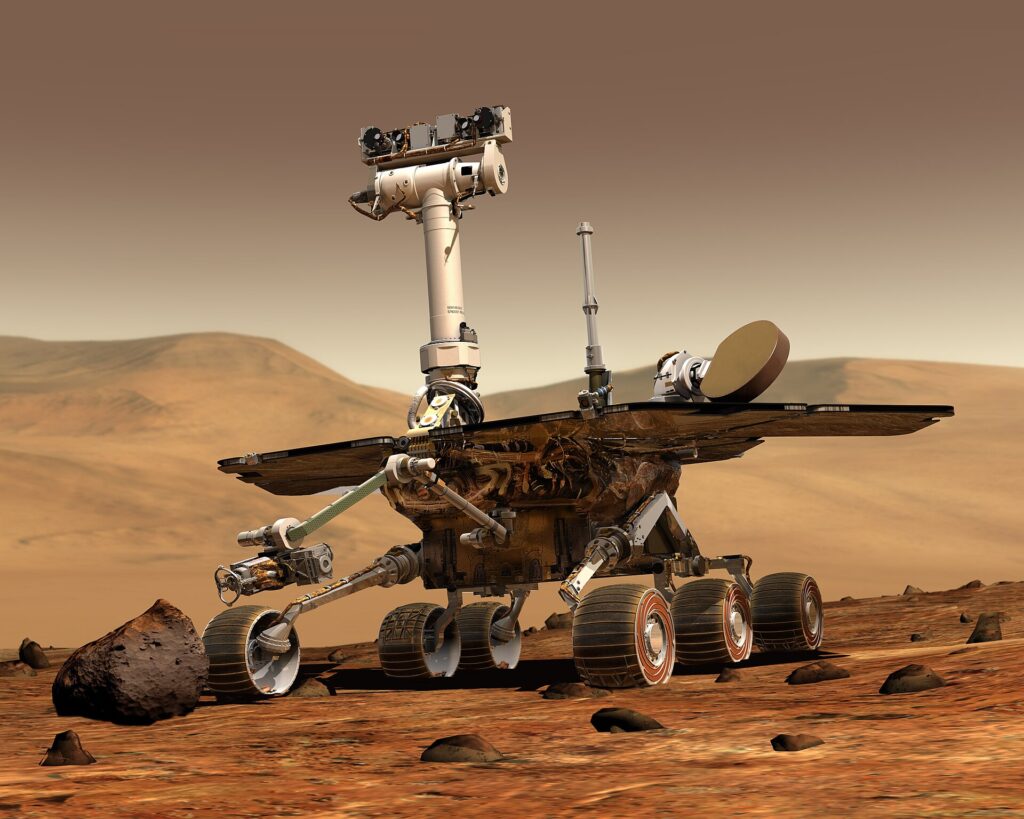 Artist’s Rendition of the Opportunity Rover; Image Credit: NASA
Artist’s Rendition of the Opportunity Rover; Image Credit: NASA
Not to be outdone, Opportunity also outlived its targeted operational times, and went even further, blowing Spirit’s record out of the water. It remained functioning on Mars for 5,352 sols (one solar day on Mars), which is the equivalent of 15 years on Earth. While there, Opportunity covered a total distance of 45.16 km (28.06 mi), letting explore plenty of the Martian soil and giving us a greater understanding of the planet’s surface than ever before.
Unlike their predecessor, Sojourner, both Spirit and Opportunity had direct communication with Earth. This is something that we will see again in other rovers, but it is definitely worth pointing out here, as well.
Rover Speeds – A Brief Interlude
Some of you might be wondering why these distances seem relatively short for years spent traveling. Well, the answer is that rovers cannot go very fast. There is a myriad of reasons behind this, but the gist of it is this. Rovers need to be as energy efficient as possible, while also sporting equipment that helps them survive the conditions they’re deployed in (such as radiation from solar rays). This equipment is not made for speed, so, combined with the energy efficiency, the velocities rovers travel at may seem quite low, often maxing out in the tenths of kilometers per hour. However, that is more than enough to get the job done.
Modern Rovers
We are now nearing the end of our journey, with only one topic left to discuss: the modern rover. This, as the title may suggest, is quite the broad subject. After all, not only do modern lunar and Martian rovers fall in this category, but other types of rovers have joined, as well. First, let’s look at the modern take on Martian rovers.
NASA’s Active Mars Rovers
There are only two rovers to talk about in this category, Curiosity and Perseverance. Quite honestly, they both deserve their own dedicated article, so I will not be going into too much depth here. Of course, as the title suggests, these are both currently active rovers. And that is why I wanted to highlight them, as they provide a nice check in for where rover technology is at the moment.
 Curiosity Rover’s “Selfie”; Image Credit: NASA
Curiosity Rover’s “Selfie”; Image Credit: NASA
First off, let’s briefly talk about Curiosity, especially since Perseverance’s is based off its design. It is a car-sized rover, which makes it larger than many of the ones discussed so far. The technology on board is also more advanced than before, letting it study the geology and climate of the planet more in-depth. More specifically, it’s studying Mars’s potential for habitability, and whether or not it has ever had the potential to host microbial life.
Perseverance, being made as a successor to Curiosity, has similar, albeit not identical goals. However, as the differences would require more time to explain, I will it at that. One thing that is very unique to Perseverance is that it carried the Ingenuity helicopter to Mars. And as I find that fascinating, I had to include this fun tidbit.
The Chinese Lunar Exploration Program
The Yutu Rovers
To get to the next lunar rovers we actually need to skip ahead a few decades from the ones discussed before. Not only that, but we need to shift to completely different countries, all located in Eastern Asia. First up we have China and the two Yutu rovers it sent to the Moon in the 2010s. Starting with Yutu, this rover was launched in December 2013 and landed on the Moon later that same month, marking the first lunar soft landing since 1976. Although it encountered difficulties in its stay there, being rendered immobile after its second 14-day lunar night, Yutu remained operational for almost 3 years. Much longer than the expected 3 months lifespan. And although immobile, it still continued to collect useful data from its GPR (ground-penetrating radar). This included getting measurements of the lunar soil up to a depth of 30 m (98 ft).
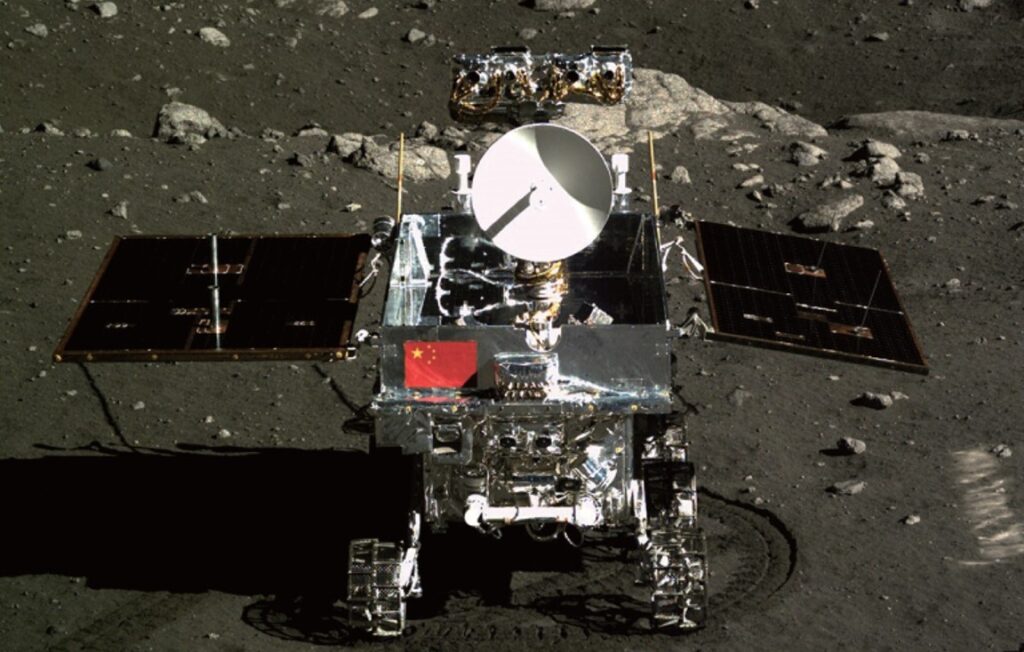 The Yutu Rover; Image Credit: Institute of High Energy Physics, Chinese Academy of Sciences
The Yutu Rover; Image Credit: Institute of High Energy Physics, Chinese Academy of Sciences
Moving on to its successor, Yutu-2, and this is another case of a mission surpassing expectations. Launched in December 2018, Yutu-2 would successfully complete a soft landing on the far side of the Moon a week later. The first ever soft landing on our satellite’s dark side, actually. And since then, the Chinese rover has been strolling around the Moon gathering as much data as possible. In fact, it currently holds (and is extending) the record for longest operational rover on the Moon. Yutu-2 also sports a GPR system, its LPR (lunar penetrating radar), which has two vertical resolutions. One of 30 cm at 30 m of depth and one of 10 m at 100 m of depth.
Yidong Xiangji
Before moving on to other countries’ lunar rovers, we should take a look at China’s latest example, Yidong Xiangji. This launched as part of Chang’e 6 and is the mini rover component of the mission. Also landing on the far side of the Moon, Yidong Xiangji accomplished the retrieval of material from this part of our satellite for the very first time. In fact, the mission ended very recently with the successful reentry of the return capsule with the samples aboard.
India and Japan Join the Fray
Just last year, India’s ISRO launched its Chandraayan-3 mission, with the Pragyan rover on board. Its goal: soft land close to the Moon’s south pole. And on August 23rd, 2023, it did just that. It then traveled the Moon for a total distance of 0.1 km (0.062 mi) and was able to complete all its assignments. One more important thing to note is that this was the first mission to touch down on the lunar south pole.
 Chandrayaan-3; Image Credit: ISRO
Chandrayaan-3; Image Credit: ISRO
Japan also sent rovers to the Moon in recent times. Two to be more exact. These are the Lunar Exploration Vehicles LEV-1 and LEV-2, which were deployed from the lunar lander SLIM. The first was designed in a very interesting way, with its mode of movement being hopping. The second, however, might be even more unique. Developed in conjunction with Sony, Doshisha University, and the toy company Tomy, LEV-2 weighs only 250 g and was made to adapt its shape to the lunar landscape. Personally, the idea of this tiny, adaptable rover traversing the Moon made my day, so I hope you enjoyed learning about this too.
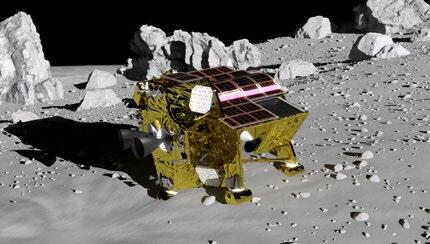 SLIM Lander; Image Credit: JAXA
SLIM Lander; Image Credit: JAXA
Other Types of Rovers and Future Missions
Before ending today’s capsule, I wanted to briefly mention rovers that have not been deployed on Mars or the Moon. So far, the only ones that fit this description are the rovers deployed by the Hayabusa 2 mission on the asteroid 163173 Ryugu. These included MINERVA – II Rover – 1A, MINERVA – II Rover – 1B, MASCOT, and MINERVA – II Rover – 2.
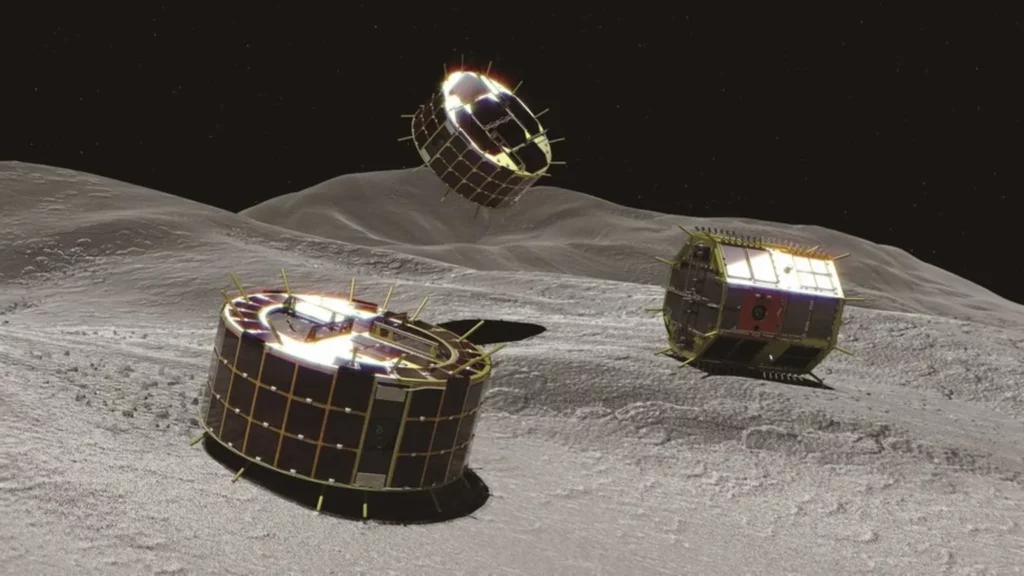 The MINERVA Rovers; Image Credit: JAXA
The MINERVA Rovers; Image Credit: JAXA
However, looking to the future, more rovers will be following in exploring other celestial bodies. Well, at least one more. NASA’s Dragonfly that is scheduled to land on Saturn’s moon Titan in 2034. One thing I’d like to point out is how the exploration of unknown bodies like this had its way paved by Sojourner.
And with that, I think it is time to end this article. Of course, there are a lot of rovers planned for the future, and it does not seem particularly beneficial to list them all. However, I do want to point out the return of crewed rovers with the Artemis missions and with the Chinese Crewed Lunar Mission. And if you are curious, I recommend looking up upcoming rover missions to see what’s in store. But with that I bid you farewell. Hope you enjoyed today’s capsule, and I hope to see you all in the next.